CSC2626 Imitation Learning for Robotics
Week 12: Representation Learning for Imitation & Provable Generalization
PAC-Bayes generalization bounds
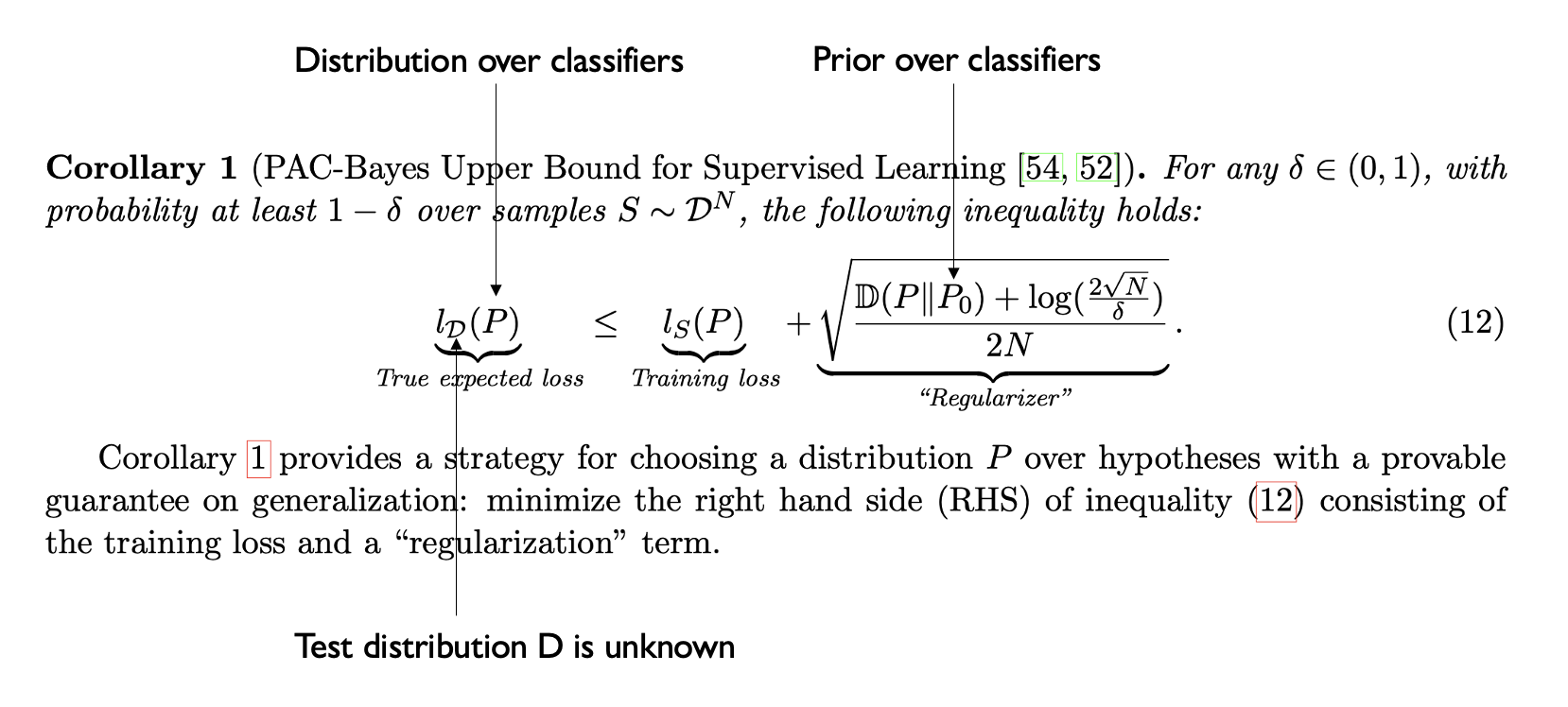
PAC-Bayes Control: Learning Policies that Provably Generalize to New Environments. Majumdar et al. 2020
PAC-Bayes Bound Applied to Control
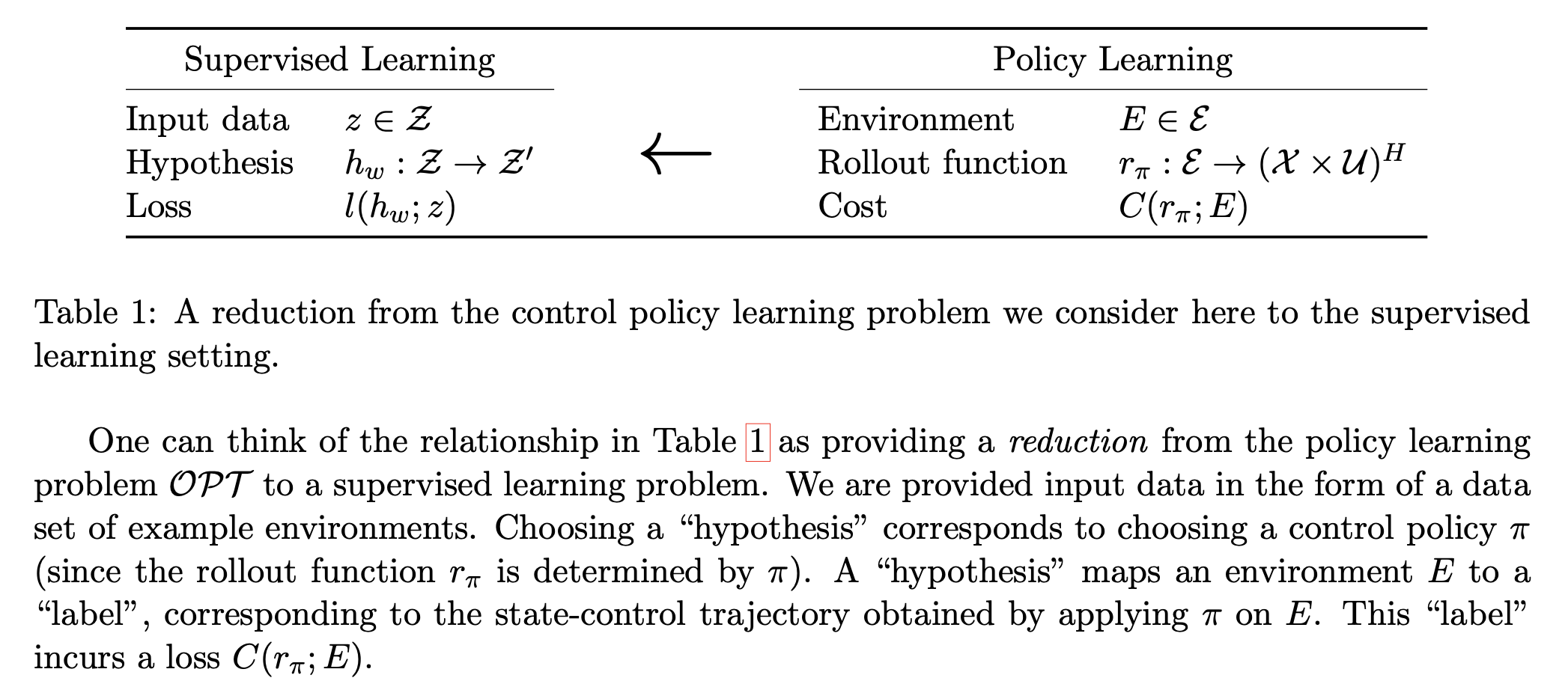
PAC-Bayes Control: Learning Policies that Provably Generalize to New Environments. Majumdar et al. 2020
PAC-Bayes Example
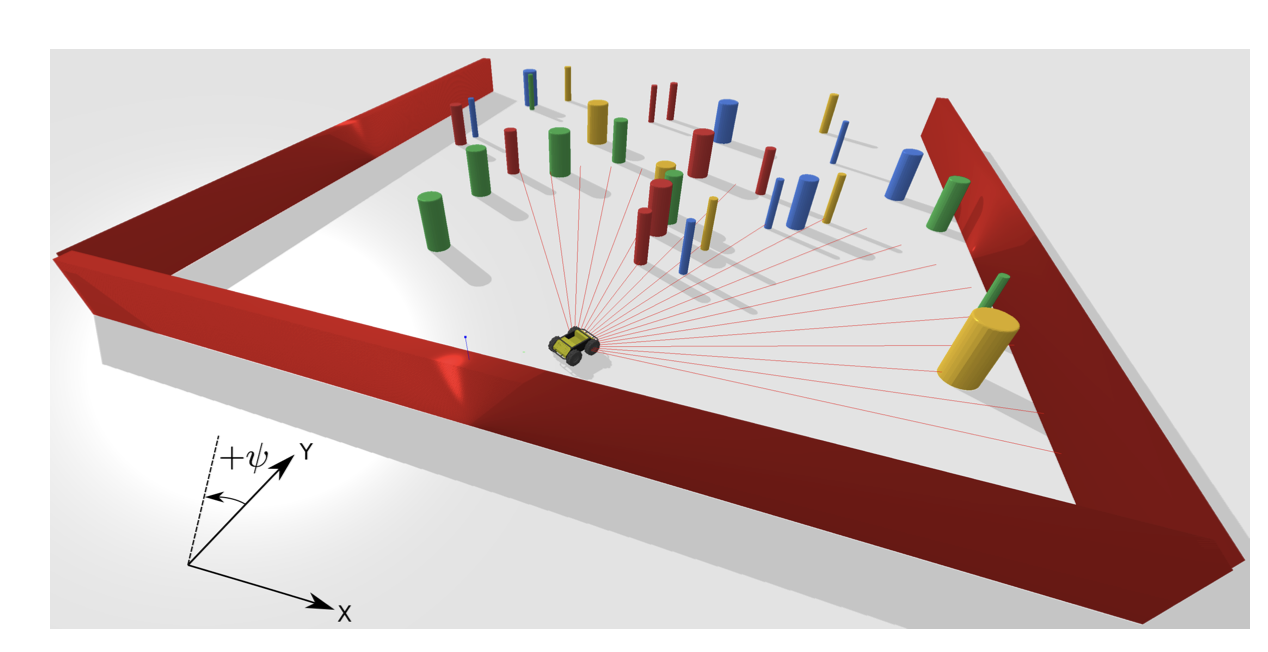
PAC-Bayes Control: Learning Policies that Provably Generalize to New Environments. Majumdar et al. 2020
What does it mean for a policy to be robust?
• The system (policy, dynamics) must be such that the policy will achieve its goal point, even if a family of disturbances/noise affect it
Composition of robust policies
LQR Trees. Tedrake, RSS 2005.
Two examples of learning Lyapunov functions